


官方公众号企业安全新浪微博

FreeBuf.COM网络安全行业门户,每日发布专业的安全资讯、技术剖析。

FreeBuf+小程序

0
1
2
3
4
5
6
7
8
9
0
1
2
3
4
5
6
7
8
9
0
1
2
3
4
5
6
7
8
9
众所周知,iPhone6/6Plus内置气压传感器,不过大家对于气压传感器还是很陌生。跟字面的意思一样,气压传感器就是用来测量气压的,但测量气压对于普通的手机用户来说又有什么作用呢?
海拔高度测量
对于喜欢登山的人来说,会非常关心自己所处的高度。海拔高度的测量方法,一般常用的有2种方式,一是通过GPS全球定位系统,二是通过测出大气压,然后根据气压值计算出海拔高度。由于受到技术和其它方面原因的限制,GPS计算海拔高度一般误差都会有十米左右,而如果在树林里或者是在悬崖下面时,有时候甚至接收不到GPS卫星信号。而气压的方式可选择的范围会广些,而且可以把成本控制的比较低。在手机原有GPS的基础上再增加气压传感器的功能,可让三维定位更加精准。
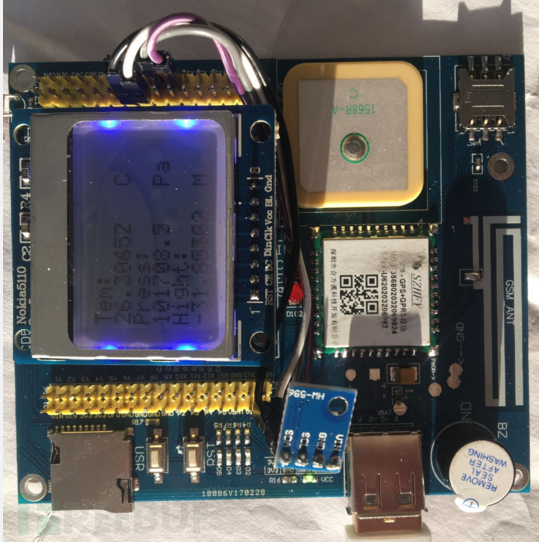
最近发现一块好玩的开发板——TPYBoardv702,这个板子可以定位、发短信、打电话,并且板载温湿度传感器、光敏传感器以及蜂鸣器,可以DIY很多有趣的东西,下面我们可以用这个板子加一个气压传感器来做一个小型气象站,来张实物图:
TPYBoardv702
定位功能我就不多说了,如果需要的话可以私聊。
那么我们利用这块板子跟BMP180气压传感器来做一个小型家庭气象站,来检测当地温度以及当地气压与海拔,如果想做更好玩的东西,可以接其他传感器或者加个继电器来控制其他设备。
BMP180是一直常见的气压传感器,BMP180是一款高精度、小体积、超低能耗的压力传感器,可以应用在移动设备中,它的性能卓越,精度最低可以达到0.03hPa,并且耗电极低,只有3μA;BMP180采用强大的8-pin陶瓷无引线芯片承载(LCC)超薄封装,可以通过I2C总线直接与各种微处理器相连。
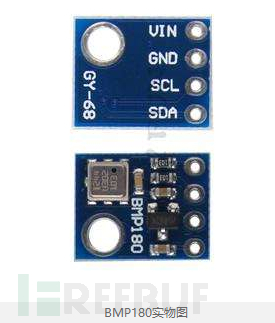
硬件接线图
| TPYBoard v702 | BMP180 |
|---|---|
| 3.3V | VIN |
| GND | GND |
| Y9 | SCL |
| Y10 | SDA |
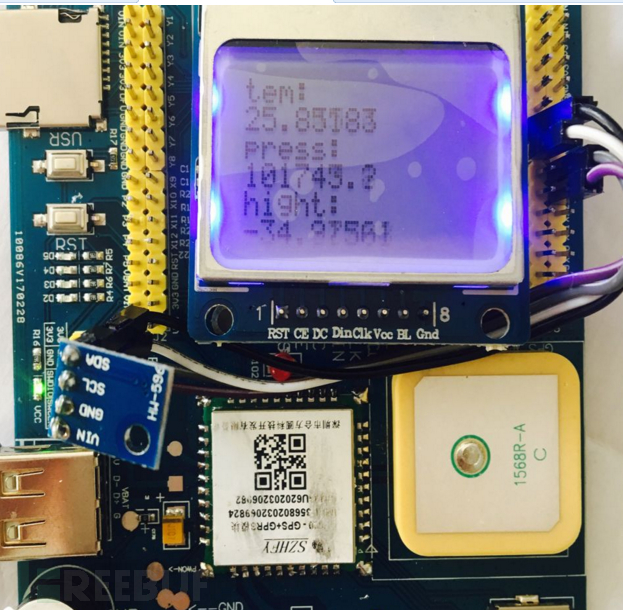
效果展示图
连接完毕后,将font.py,upcd8544.py与bmp180的库导入,就可以通过以下方法分别读取温度、气压、海拔高度了。
源代码
oot.py,upcd8544.py库的下载地址
http://www.tpyboard.com/support/studyexample14/206.html
导入需要的类库,编辑好main.py,直接运行就ok了,下面是main.py的程序源码
# main.py -- put your code here!
import pyb
import upcd8544
from machine import SPI,Pin
from ubinascii import hexlify
from ubinascii import *
from bmp180 import BMP180
bmp=BMP180(2)
SPI = pyb.SPI(1) #DIN=>X8-MOSI/CLK=>X6-SCK
#DIN =>SPI(1).MOSI 'X8' data flow (Master out, Slave in)
#CLK =>SPI(1).SCK 'X6' SPI clock
RST = pyb.Pin('X20')
CE = pyb.Pin('X19')
DC = pyb.Pin('X18')
LIGHT = pyb.Pin('X17')
lcd_5110 = upcd8544.PCD8544(SPI, RST, CE, DC, LIGHT)
while True:
tem=bmp.getTemp()
press=bmp.getPress()
altitude=bmp.getAltitude()
lcd_5110.lcd_write_string('Tem:',0,0)
lcd_5110.lcd_write_string(str(tem),0,1)
lcd_5110.lcd_write_string('C',65,1)
lcd_5110.lcd_write_string('Press:',0,2)
lcd_5110.lcd_write_string(str(press),0,3)
lcd_5110.lcd_write_string('Pa',65,3)
lcd_5110.lcd_write_string('Hight:',0,4)
lcd_5110.lcd_write_string(str(altitude),0,5)
lcd_5110.lcd_write_string('M',65,5)
bmp180.py库的源码
import pyb
from pyb import I2C
BMP180_I2C_ADDR = const(0x77)
class BMP180():
def __init__(self, i2c_num):
self.i2c = I2C(i2c_num, I2C.MASTER, baudrate = 100000)
self.AC1 = self.short(self.get2Reg(0xAA))
self.AC2 = self.short(self.get2Reg(0xAC))
self.AC3 = self.short(self.get2Reg(0xAE))
self.AC4 = self.get2Reg(0xB0)
self.AC5 = self.get2Reg(0xB2)
self.AC6 = self.get2Reg(0xB4)
self.B1 = self.short(self.get2Reg(0xB6))
self.B2 = self.short(self.get2Reg(0xB8))
self.MB = self.short(self.get2Reg(0xBA))
self.MC = self.short(self.get2Reg(0xBC))
self.MD = self.short(self.get2Reg(0xBE))
self.UT = 0
self.UP = 0
self.B3 = 0
self.B4 = 0
self.B5 = 0
self.B6 = 0
self.B7 = 0
self.X1 = 0
self.X2 = 0
self.X3 = 0
def short(self, dat):
if dat > 32767:
return dat - 65536
else:
return dat
def setReg(self, dat, reg):
buf = bytearray(2)
buf[0] = reg
buf[1] = dat
self.i2c.send(buf, BMP180_I2C_ADDR)
def getReg(self, reg):
buf = bytearray(1)
buf[0] = reg
self.i2c.send(buf, BMP180_I2C_ADDR)
t = self.i2c.recv(1, BMP180_I2C_ADDR)
return t[0]
def get2Reg(self, reg):
a = self.getReg(reg)
b = self.getReg(reg + 1)
return a*256 + b
def measure(self):
self.setReg(0x2E, 0xF4)
pyb.delay(5)
self.UT = self.get2Reg(0xF6)
self.setReg(0x34, 0xF4)
pyb.delay(5)
self.UP = self.get2Reg(0xF6)
def getTemp(self):
self.measure()
self.X1 = (self.UT - self.AC6) * self.AC5/(1<<15)
self.X2 = self.MC * (1<<11) / (self.X1 + self.MD)
self.B5 = self.X1 + self.X2
return (self.B5 + 8)/160
def getPress(self):
self.getTemp()
self.B6 = self.B5 - 4000
self.X1 = (self.B2 * (self.B6*self.B6/(1<<12))) / (1<<11)
self.X2 = (self.AC2 * self.B6)/(1<<11)
self.X3 = self.X1 + self.X2
self.B3 = ((self.AC1*4+self.X3) + 2)/4
self.X1 = self.AC3 * self.B6 / (1<<13)
self.X2 = (self.B1 * (self.B6*self.B6/(1<<12))) / (1<<16)
self.X3 = (self.X1 + self.X2 + 2)/4
self.B4 = self.AC4 * (self.X3 + 32768)/(1<<15)
self.B7 = (self.UP-self.B3) * 50000
if self.B7 < 0x80000000:
p = (self.B7*2)/self.B4
else:
p = (self.B7/self.B4) * 2
self.X1 = (p/(1<<8))*(p/(1<<8))
self.X1 = (self.X1 * 3038)/(1<<16)
self.X2 = (-7357*p)/(1<<16)
p = p + (self.X1 + self.X2 + 3791)/16
return p
def getAltitude(self):
p = self.getPress()
return (44330*(1-(p/101325)**(1/5.255)))
def get(self):
t = []
t.append(self.getPress())
t.append(self.getAltitude())
t.append(self.getTemp())
return t
*本文作者:bodasister,转载请注明来自FreeBuf.COM
如需授权、对文章有疑问或需删除稿件,请联系 FreeBuf 客服小蜜蜂(微信:freebee1024)







- 5 文章数
- 1 关注者