


官方公众号企业安全新浪微博

FreeBuf.COM网络安全行业门户,每日发布专业的安全资讯、技术剖析。

FreeBuf+小程序

- 关注
 本文由
创作,已纳入「FreeBuf原创奖励计划」,未授权禁止转载
本文由
创作,已纳入「FreeBuf原创奖励计划」,未授权禁止转载
前言
近日想研究一下arm架构下的linux kernel。文章记录了一下qemu虚拟化启动linux kernel与linux kernel的交叉编译与动态调试。
0x1 qemu手动编译安装
安装ninja
apt install re2c
git clone https://github.com/ninja-build/ninja.git && cd ninja
./configure.py --bootstrap
sudo cp ninja /usr/bin/
依赖解决
sudo apt-get install libglib2.0-dev
sudo apt-get install libpixman-1-dev
编译安装qemu
wget https://download.qemu.org/qemu-7.1.0-rc2.tar.xz
tar -xf qemu-7.1.0-rc2.tar.xz
cd qemu-7.1.0-rc2
./configure
make -j8
编译后的产物在build文件夹
之后将build目录添加进 PATH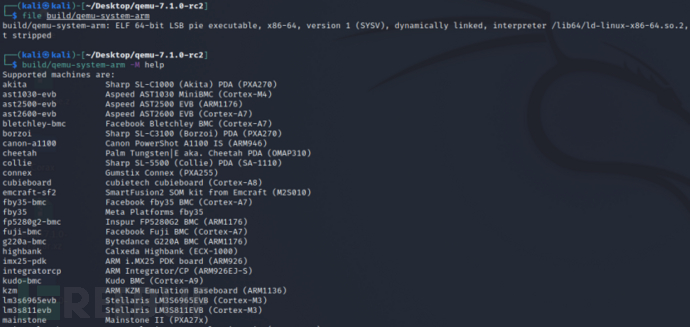
手动编译的qemu相较于通过apt安装的qemu支持更多的虚拟化机器类型。Apt安装的qemu的版本相对较低很多。
0x2 linux Kernel编译
安装依赖
sudo apt install libncurses-dev
sudo apt install bison flex
linux kernel获取与编译
git clone https://github.com/torvalds/linux
切换指定分支后通过qemu配置生成 .config
make ARCH=arm vexpress_defconfig
编译内核
make ARCH=arm CROSS_COMPILE=arm-linux-gnueabi- zImage
make ARCH=arm CROSS_COMPILE=arm-linux-gnueabi- all

0x3 busybox文件系统制作
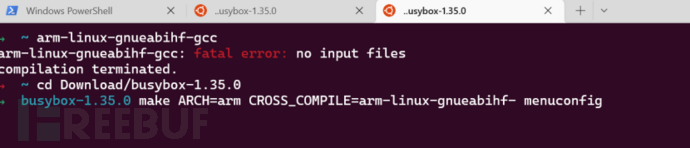
make ARCH=arm CROSS_COMPILE=arm-linux-gnueabihf- menuconfig
设置生成静态可执行文件
Setting->Build Options->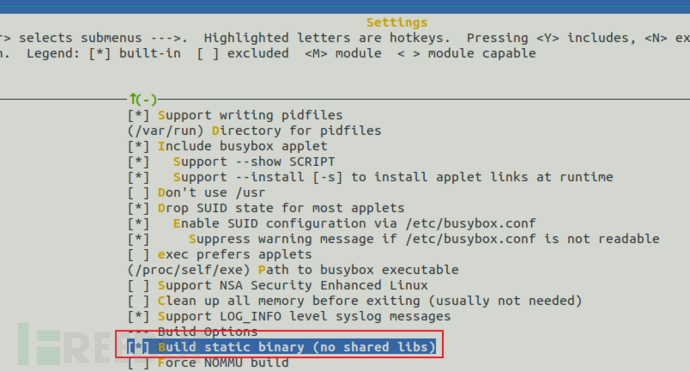
#busybox编译与安装
make ARCH=arm CROSS_COMPILE=arm-linux-gnueabihf-
make ARCH=arm CROSS_COMPILE=arm-linux-gnueabihf- install
rootfs镜像制作
#进入busybox编译目录的上级目录 建立目录结构
cd ../
mkdir rootfs
mkdir rootfs/proc rootfs/sys rootfs/dev rootfs/etc rootfs/tmp
cp -a ../busybox-1.35.0/examples/bootfloppy/etc/* rootfs/etc
dd if=/dev/zero of=rootfs.ext3 bs=1M count=32
mkfs.ext3 rootfs.ext3
mkdir -p tmpfs
sudo mount -o loop rootfs.ext3 tmpfs
sudo cp -r rootfs/* tmpfs/
sudo umount tmpfs
0x4 qemu-system-arm 启动Kernel
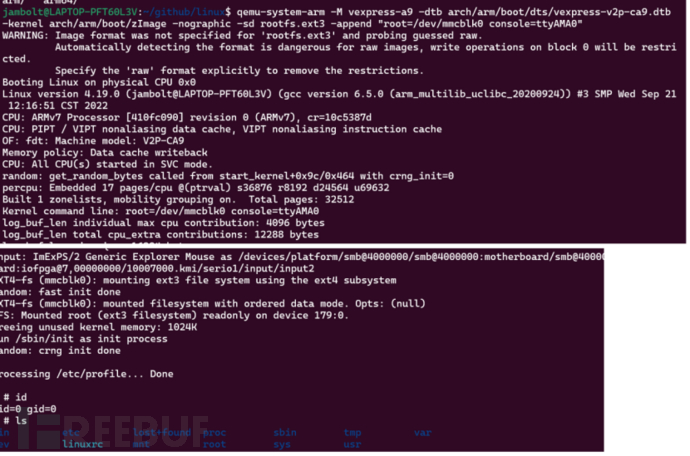
启动时需要添加一下 dtb
qemu-system-arm -M vexpress-a9 -dtb arch/arm/boot/dts/vexpress-v2p-ca9.dtb -kernel arch/arm/boot/zImage -nographic -sd rootfs.ext3 -append "root=/dev/mmcblk0 console=ttyAMA0"
0x5 qemu-system-arm 调试Kernel
qemu-system-arm -M vexpress-a9 -dtb arch/arm/boot/dts/vexpress-v2p-ca9.dtb -kernel arch/arm/boot/zImage -nographic -sd rootfs.ext3 -append "root=/dev/mmcblk0 console=ttyAMA0" -s -S -gdb tcp::1234
由于是arm架构使用了gdb插件 gef
gef➤ set architecture arm
gef➤ file vmlinux
gef➤ target remote localhost:1234
由于qemu启动未挂载rootfs,故而gdb会停在mount过程
直接一个continue 一跑到底,看到了kernel启动过程的函数调用栈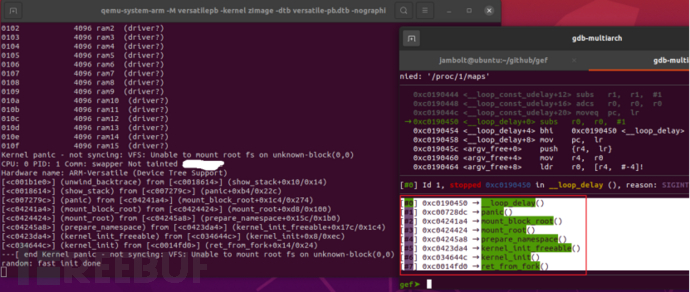
0x6 arm 架构的Kernel启动流程
依据gdb中的trace对每个函数进行定位。当前使用的是kernel源码中的arch/arm 架构
ret_from_fork
arch\arm\kernel\entry-common.S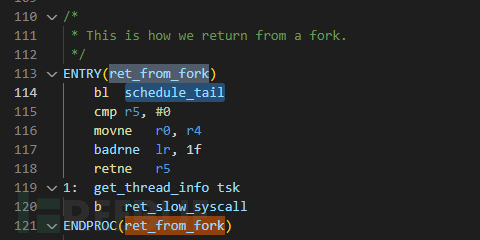
Gdb看到编译产物的汇编代码和源码中略有区别,直接向pc赋值跳转到Kernel_init
Kernel_init
首先下个断点,然后重新开始qemu联调
gef➤ b kernel_init
gef➤ c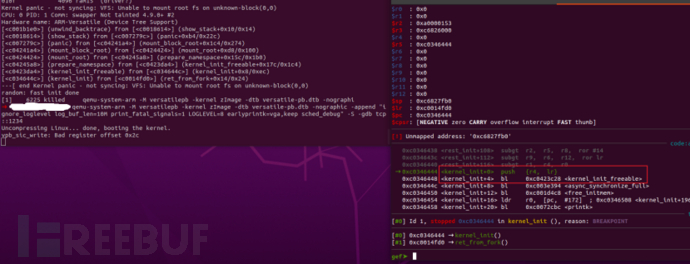
函数位置 init\main.c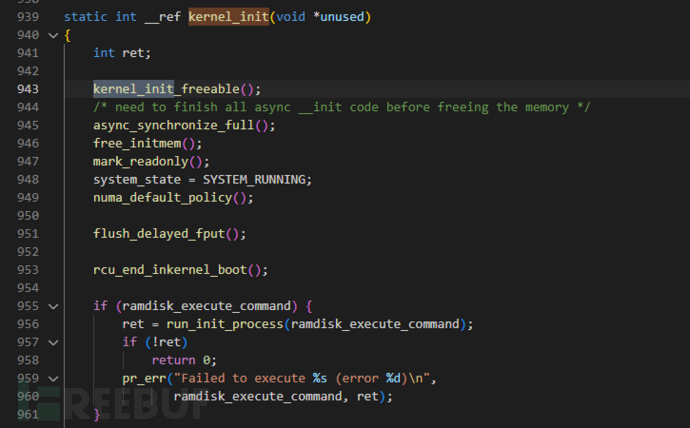
直接进入kernel_init_freeable执行
Kernel_init_freeable
函数位置init\main.c
通过TRACE确认 之后要执行prepare_namespace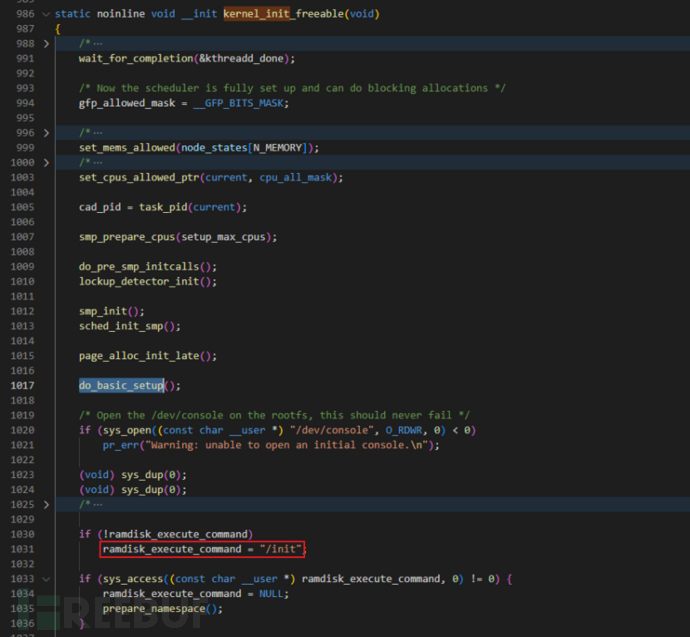
prepare_namespace
函数位置 init\do_mounts.c
依据逻辑校验判定,开始执行mount挂载目录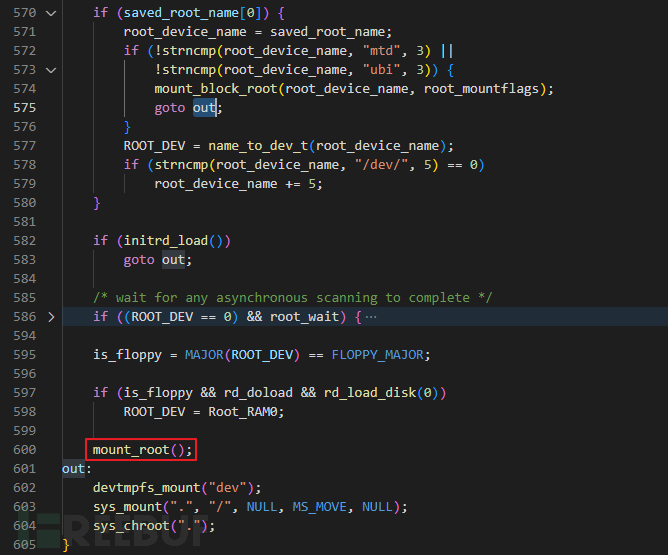
initrd_load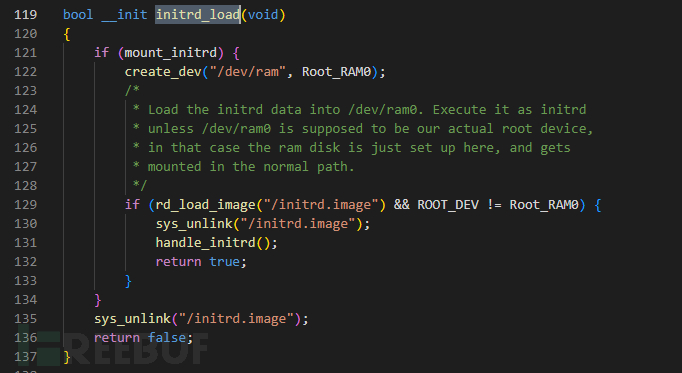
mount_root
Linux中的源码
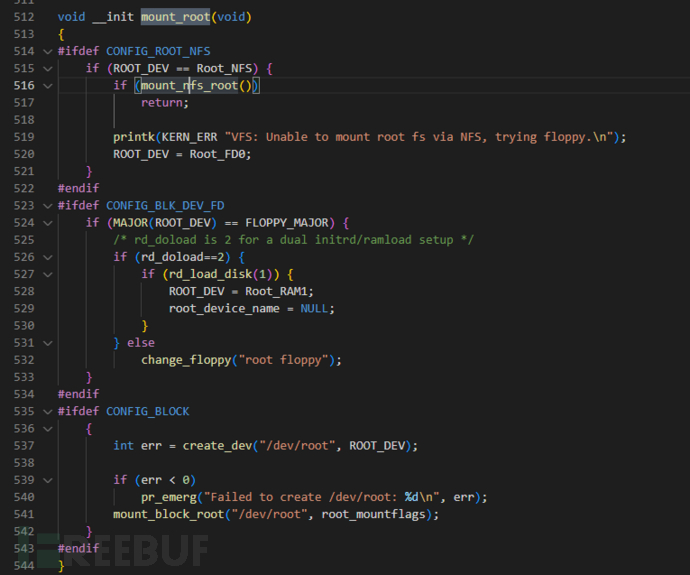
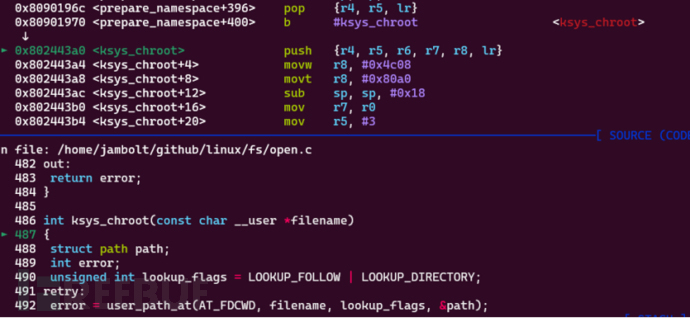
挂载ext3 文件体统后,进入 ksys_chroot
之后跳转 load_default_elevator_module
校验 /dev/console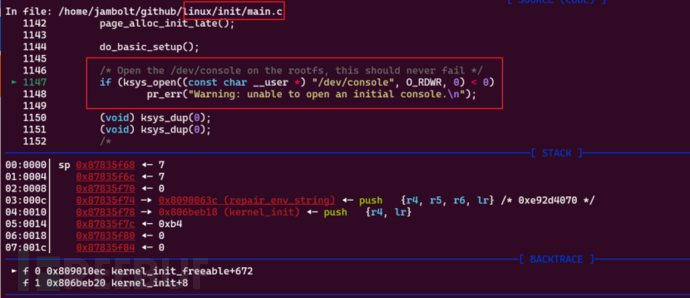
校验 ramdisk_execute_command 成功后 进行prepare_namespace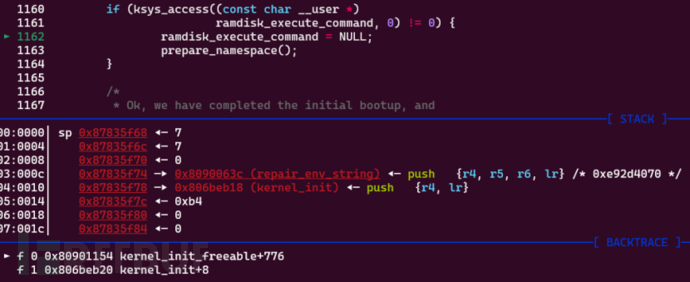
Ksys的挂载与chroot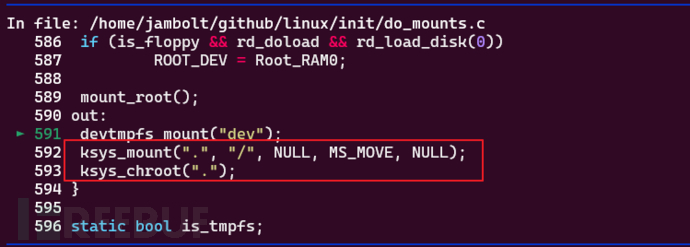
测试初始化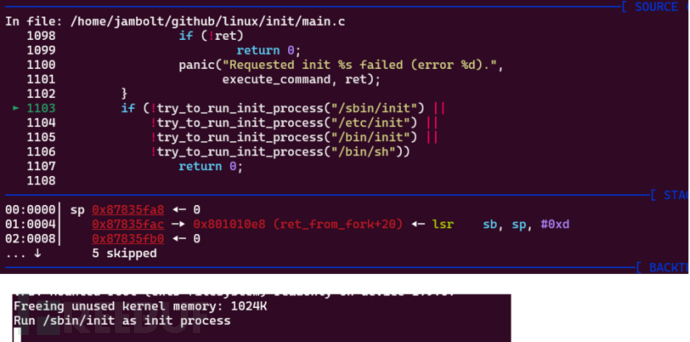
终端的命令执行
最后定位到了 do_idle函数循环执行初始化任务,开启/bin/sh 并且执行linux命令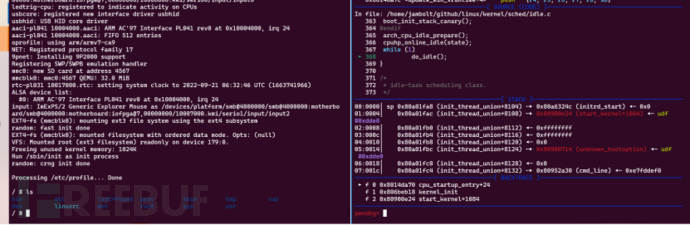
本文作者:Jambolt@涂鸦智能安全实验室
已在FreeBuf发表 0 篇文章
- 0 文章数
- 0 关注者