


官方公众号企业安全新浪微博

FreeBuf.COM网络安全行业门户,每日发布专业的安全资讯、技术剖析。

FreeBuf+小程序

- 关注
 本文由
创作,已纳入「FreeBuf原创奖励计划」,未授权禁止转载
本文由
创作,已纳入「FreeBuf原创奖励计划」,未授权禁止转载
*严正声明:本文仅限于技术讨论与分享,严禁用于非法途径
前言
在FB看了不少关于ESP8266钓鱼测试的文章,这么低成本的玩法,我心动了。在一次买了两个烧录数次Copy过来的代码后就一直吃灰,想必各位也有类似的经历。那么本着“废物”利用的原则,今天来打造一个手机遥控的玩具小车,使用WiFi接入,当设备和手机在同一个局域网中,为局域网通信,其余情况,使用MQTT远程通信。
思路:nodemcu接入wifi同时根据指令控制舵机,通过给电机驱动板不同的高低电平,使舵机驱动板驱动马达。
假设 A1 A2为输入口,D1 D2为输出口(接电机。) 给驱动板供电以后,假设利用Nodemcu使A1为高电平,A2为低电平,则电机正转,相反,A2高电平,A1低电平,那么电机反转,A1 A2都为低电平,则电机不转。
准备工作
需要的设备
废弃玩具遥控车、淘汰手机旧电池、吃灰的钓鱼玩具ESP8266、9.9包邮舵机一个、小车里拆下来的线材、航模马达一个、灵巧的一双手。
使用Arduino IDE来对Nodemcu(就是esp8266+4M的flask,即你们吃灰的那个)编程。所以需要先简单的配置一下arduino。
安装软件|添加esp8266支持
首先从Arduino 官网下载最新版本的Arduino IDE软件并安装。
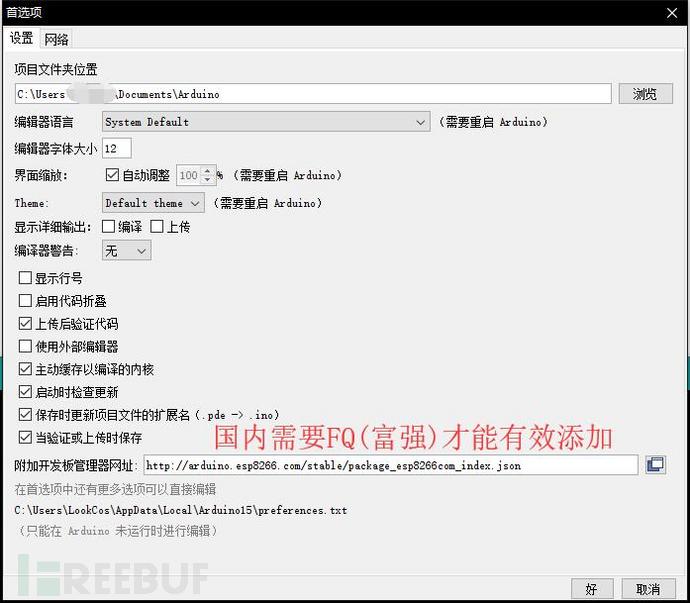
安装完成以后,进入首选项(Preferences),找到附加开发板管理器地址(Additional Board Manager URLs),并在其后添加如下信息:
http://arduino.esp8266.com/stable/package_esp8266com_index.json
之后点击工具-开发板-开发板管理器,进入开发板管理器界面:

下载并安装blinker Arduino库
点击下载https://github.com/blinker-iot/blinker-library/archive/master.zip
Windows:将下载好的blinker库解压到我的电脑>文档>Arduino>libraries文件夹中
Mac OS:将下载好的blinker库解压到文稿>Arduino>libraries文件夹中
在app中添加设备,获取Secret Key
APK地址:http://blinker.clz.me/blinker-2.2.4.apk
进入App,点击右上角的“+”号,然后选择添加设备
点击选择Arduino>WiFi接入
选择要接入的服务商
复制申请到的Secret Key
DIY一个炫酷的界面
在设备列表页,点击设备图标,进入设备控制面板
首次进入设备控制面板,会弹出向导页
在向导页点击载入示例,即可载入示例组件


拆解并改装小车:

以前大概这样?
改装转弯模块
拆掉华丽的外表,并用烙铁在如图位置开个方形洞:

把多余的部件清理掉,余下转动装置
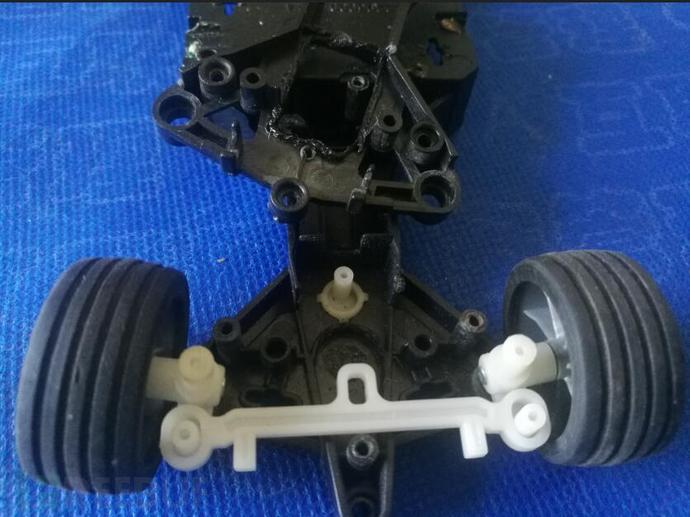
清理干净,电池盒的盖子什么的掀飞。不平的地方用烙铁抹平。

将舵机的舵把用螺丝固定,舵把在合适的位置拧上一个长螺丝钉,但是不要太长以免无法合盖。舵把的螺丝钉扣住玩具小车转向装置中间的洞。舵机牵拉,便可达到一个转弯的效果。

刚才打孔的地方就是固定舵机的地方。

组装好,再用螺丝压紧。

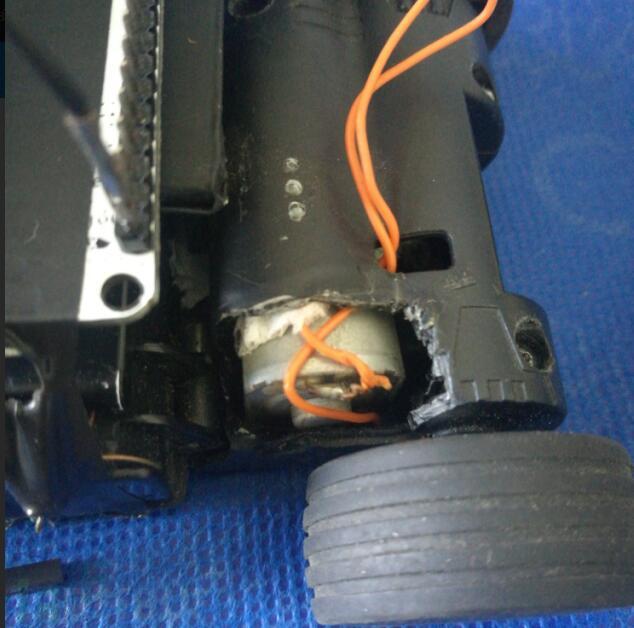
改装动力模块
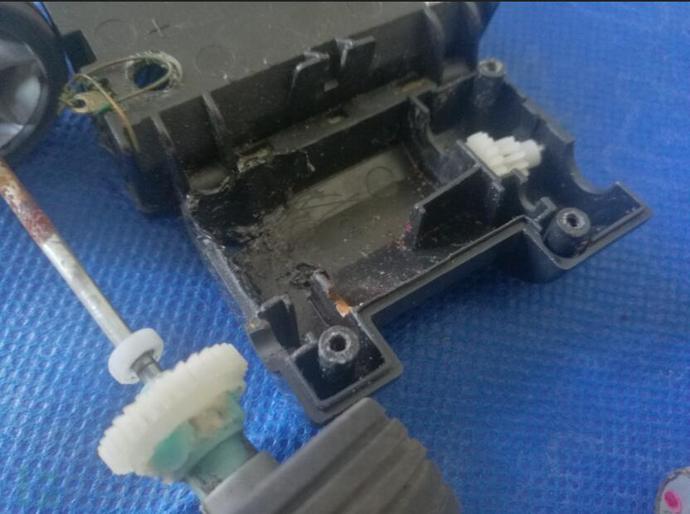
更换电机:把右边的垃圾小机机改为左边的老式航模电机。

由于航模电机长了一节,是不可能盖严了,把盖住电机屁股的那一块用烙铁抹掉。

盖住以后传动丝滑流畅,虽然丑了点,但是强行装上电机了。

编写程序
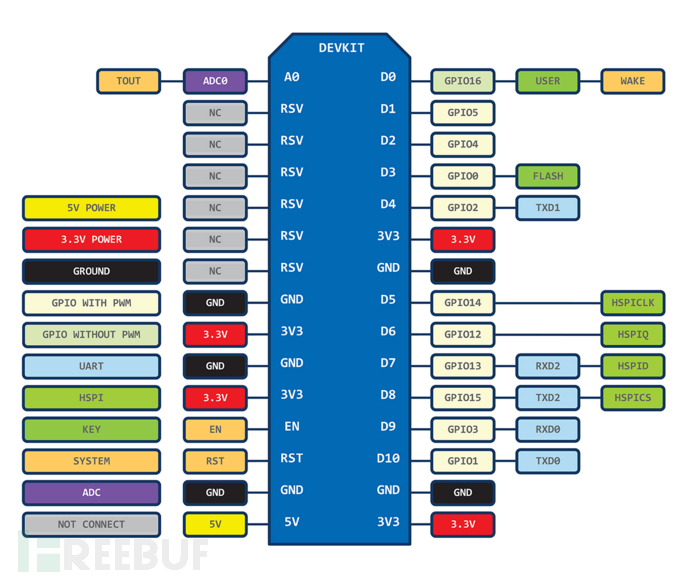
值得一提的是,你需要用哪个口直接填写即可。例如 你使用gpio5 接一个小灯泡。声明变量时填写 int led = D1; 即可
#define BLINKER_PRINT Serial
#define BLINKER_WIFI
#include <Blinker.h>
#include <Servo.h>
Servo myservo;
//向右转
void right(){
int pos = 0;
//舵机端口号
myservo.attach(D1);
for(pos = 0; pos <= 180; pos += 3){
myservo.write(pos);
delay(10);
}
myservo.write(180);
delay(200);
}
//向左转
void left(){
int pos=100;
myservo.attach(D1);
for(pos = 100; pos >= 0; pos -= 3){
myservo.write(pos);
delay(10);
}
myservo.write(0);
delay(200);
}
//复位
void rest(){
myservo.attach(D1);
myservo.write(100);
delay(200);
}
char auth[] = "b8b8d0568edb";
char ssid[] = "LookCos";
char pswd[] = "123456789";
// 前进后退,左转右转
BlinkerButton Button1("btn-qj");
BlinkerButton Button2("btn-ht");
BlinkerButton Button3("btn-zz");
BlinkerButton Button4("btn-yz");
//方向复位按键
BlinkerButton Button5("btn-rest");
//停车
BlinkerButton Button6("btn-stop");
BlinkerNumber Number1("num-abc");
int counter = 0;
// 前进
void button1_callback(const String & state) {
BLINKER_LOG("get button state: ", state);
digitalWrite(D3, HIGH);
digitalWrite(D2, LOW);
}
// 后退
void button2_callback(const String & state) {
BLINKER_LOG("get button state: ", state);
digitalWrite(D2, HIGH);
digitalWrite(D3, LOW);
}
// 左转
void button3_callback(const String & state) {
BLINKER_LOG("get button state: ", state);
left();
}
// 右转
void button4_callback(const String & state) {
BLINKER_LOG("get button state: ", state);
right();
}
// 方向复位
void button5_callback(const String & state) {
BLINKER_LOG("get button state: ", state);
rest();
}
//停车
void button6_callback(const String & state) {
BLINKER_LOG("get button state: ", state);
rest();
digitalWrite(D2, LOW);
digitalWrite(D3, LOW);
}
// 如果未绑定的组件被触发,则会执行其中内容
void dataRead(const String & data)
{
BLINKER_LOG("Blinker readString: ", data);
counter++;
Number1.print(counter);
}
void setup() {
// 初始化串口
Serial.begin(115200);
int QQ_GROUP = 8805926;
#if defined(BLINKER_PRINT)
BLINKER_DEBUG.stream(BLINKER_PRINT);
#endif
pinMode(D2, OUTPUT);
pinMode(D3, OUTPUT);
// 初始化blinker
Blinker.begin(auth, ssid, pswd);
Blinker.attachData(dataRead);
//前后左右
Button1.attach(button1_callback);
Button2.attach(button2_callback);
Button3.attach(button3_callback);
Button4.attach(button4_callback);
//方向复位
Button5.attach(button5_callback);
//停车
Button6.attach(button6_callback);
}
void loop() {
Blinker.run();
}
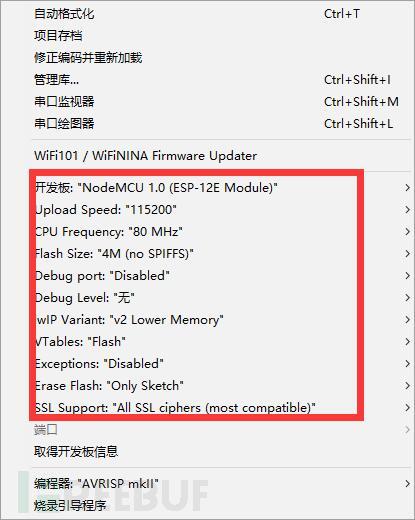
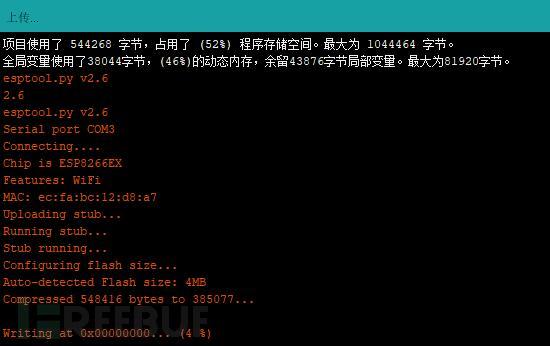
烧录程序(直接USB插上即可):
一般的Nodemcu 如何选择即可。
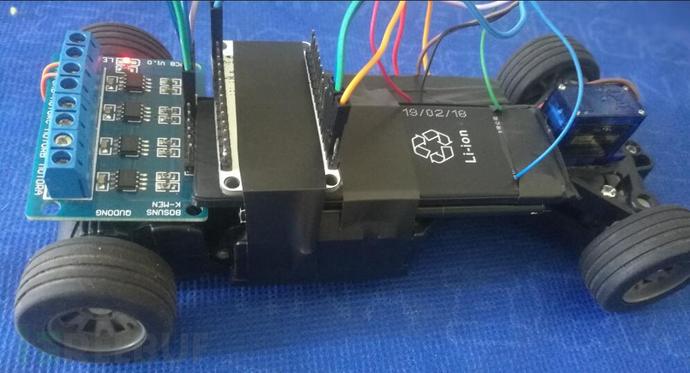
组装好,调试:
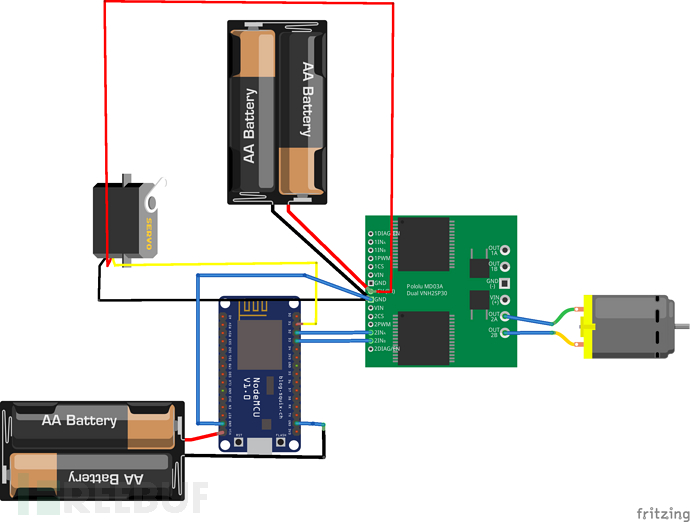
第一次用这个东西画图,画的不太好,而且我的电机驱动模块没有找到。就找了一个(绿色的那个)代替。
如图,我使用外置5V电源来驱动舵机与马达,值得注意的是,舵机要与Nodemcu共地(地线接一块)才能控制舵机。
下面那个电池(iPhone 5S原装电池)专门用来驱动Nodemcu 3.3V与5V皆可。
亲测,局域网环境,延迟很低。
完成了,放到地面跑还是很快的。圆了儿时梦想。
参考资料
*本文原创作者:中华隐士家族,本文属于FreeBuf原创奖励计划,未经许可禁止转载
已在FreeBuf发表 0 篇文章
- 0 文章数
- 0 关注者